- https://youtu.be/24gmyie3OFY
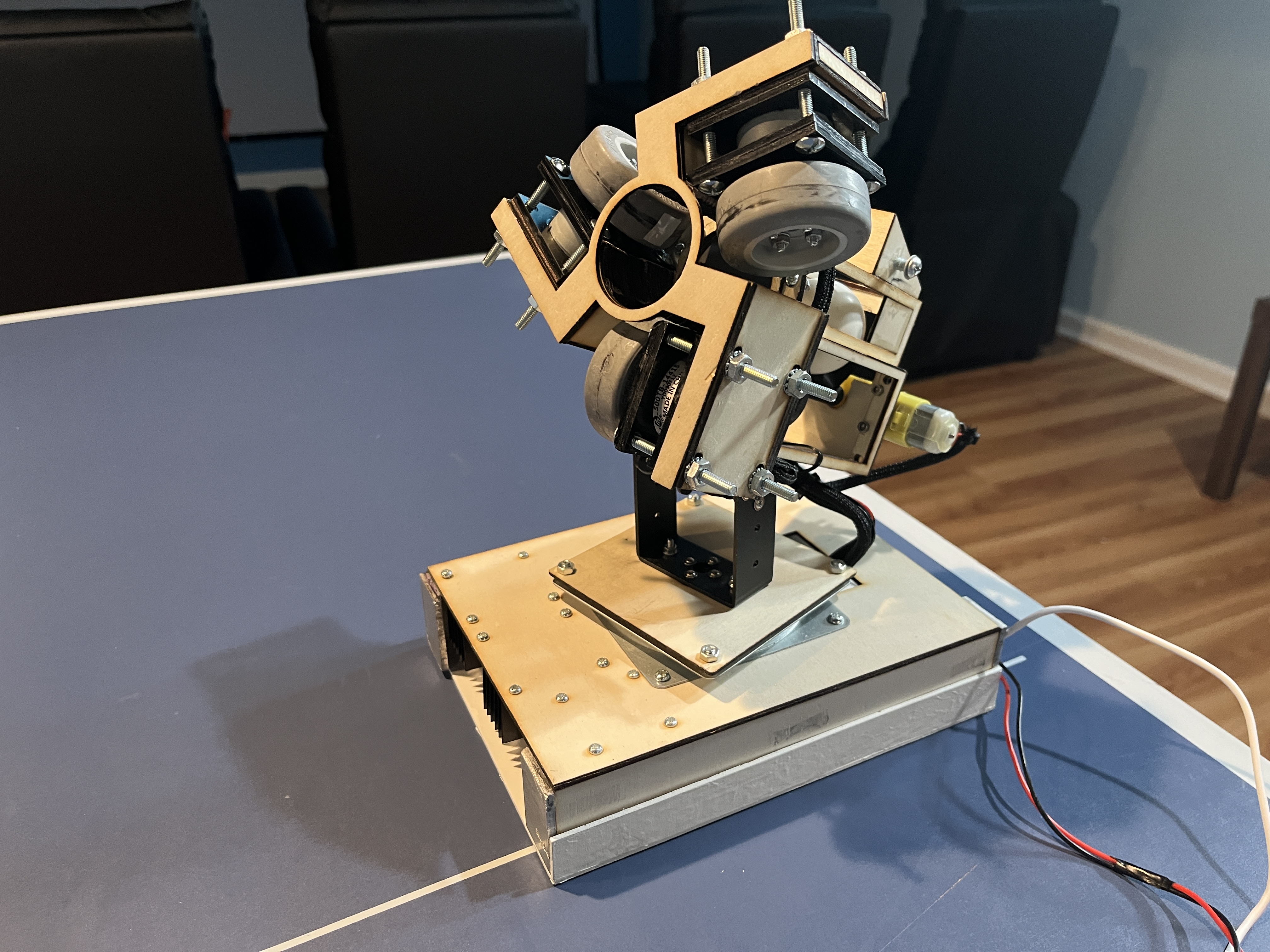
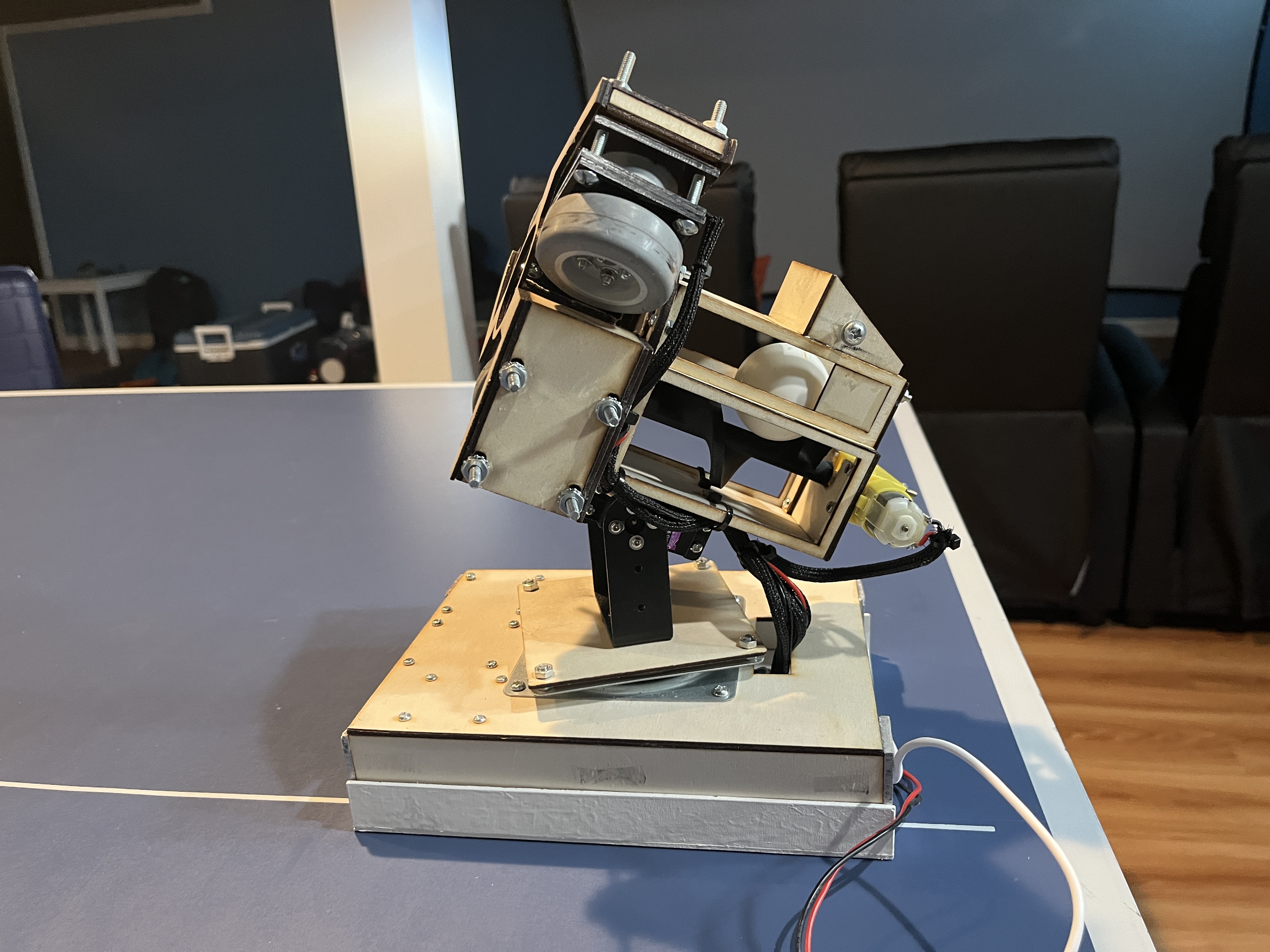
- One of my proudest achievements is creating an automatic ping-pong shooter. Being a ping-pong enthusiast and the founder of the ping-pong club at my high school, I wanted to improve my skills, but faced the obstacle of not having a playing partner at home. To overcome this, I decided to build a custom ping-pong shooter. Using my expertise in CAD, I designed the machine with precise sketches and parameters that can be easily modified. The machine is equipped with three brushless motors that can shoot the ball at any required speed and spin. A significant challenge arose, however, in achieving consistent and accurate ball shots.
- The initial design, which featured a horizontal spinning rod, proved to be unreliable when transporting balls from the bucket/loader to the flywheel at different heights. To address this issue, I did extensive research and opted for a screw conveyor design, which eliminated reliance on gravity and ensured uniform transportation of ping pong balls.
- To get consistent shots, I faced difficulty in landing balls at the same spot due to variations in their speed. To overcome this issue, I conducted a series of trials and collected data. After analyzing the data, I discovered a correlation between the speed of the ball and robot shooting angle. To ensure accuracy regardless of the speed of the ball, I integrated a line of best-fit formula into the robot's code and the custom app I developed. This formula calculates the optimal shooting angle, resulting in precise shots.
- However, I acknowledge the imperfections of the line of best-fit approach in achieving greater accuracy. Therefore, I plan to integrate reinforcement learning with video feedback to elevate the shooter’s performance. By leveraging the power of artificial intelligence, I aim to surpass the limitations of manual data point creation, making my machine even more consistent.
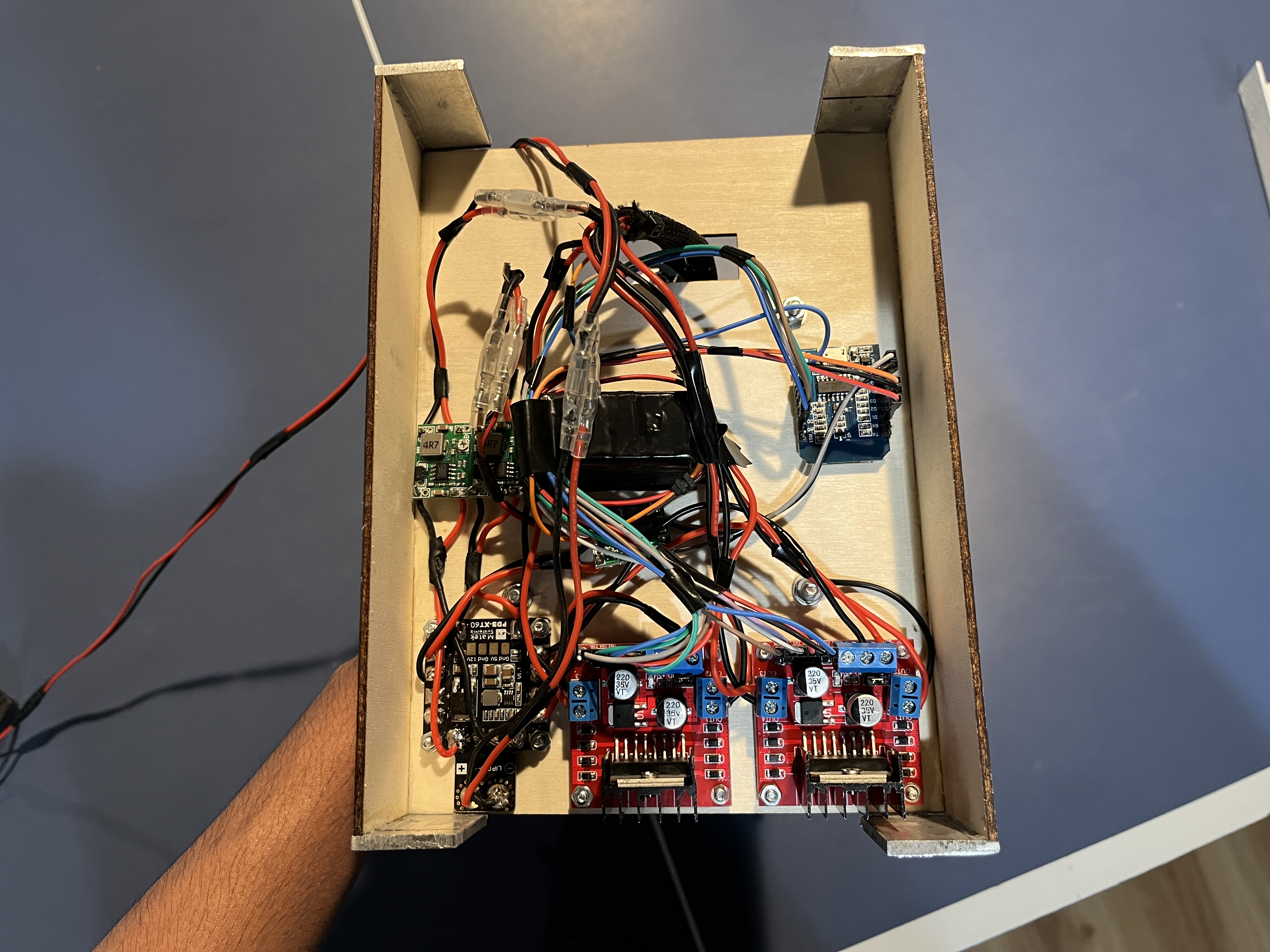
- Before this project, I lacked electrical work skills. However, with the help of the internet and my peers, I learned many new electrical work skills. Despite numerous setbacks and design changes, I dedicated over 1000 hours to the project, and my efforts resulted in a successful machine that significantly improved my skills through consistent practice.
- https://youtu.be/IT2rA0ngQLg
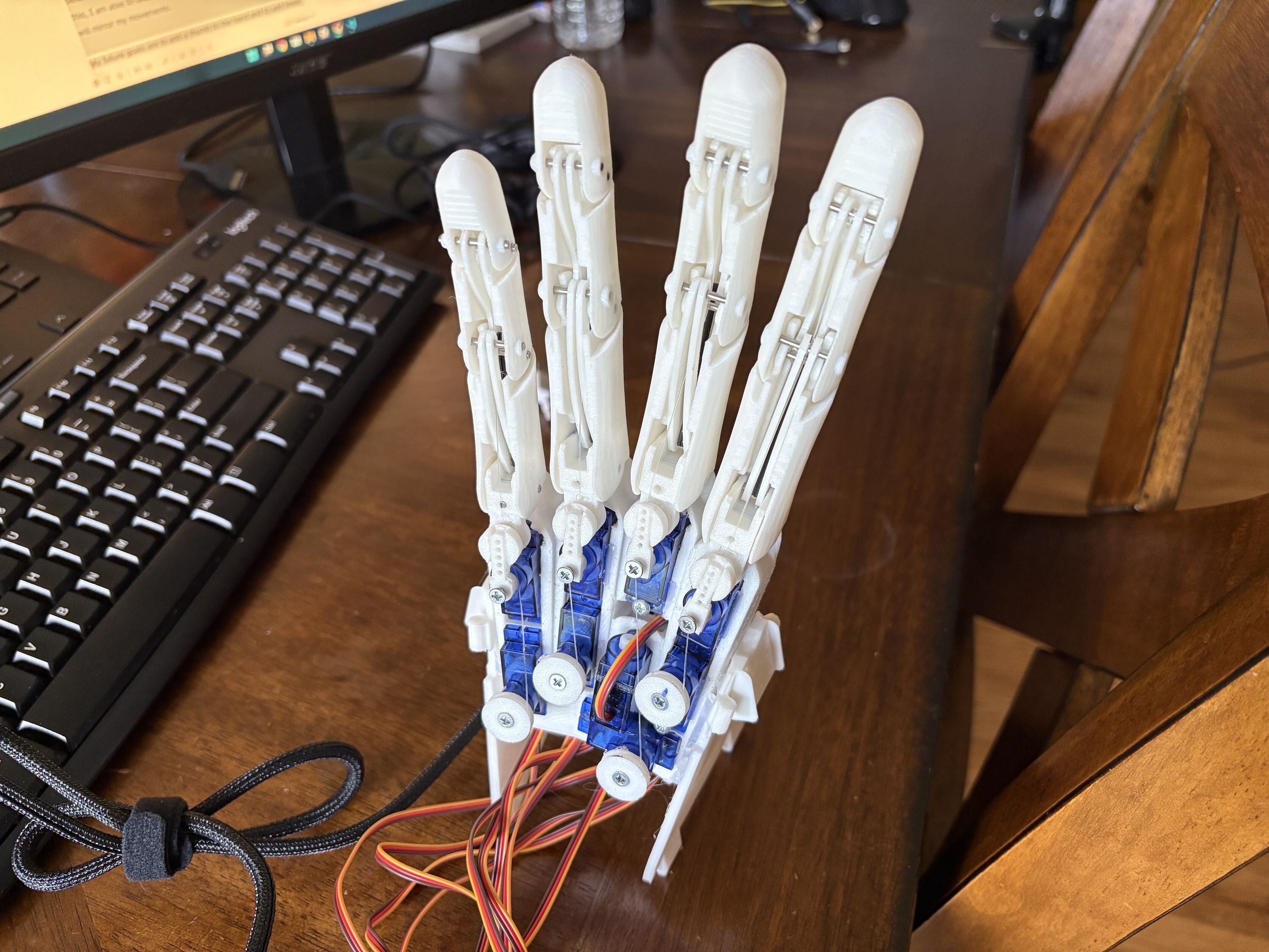
- I created a robotic hand that closely resembles a human hand. Each finger is equipped with two micro 180-degree servos: one servo controls the curling motion, while the other manages the spreading of the fingers. I 3D printed the fingers and palm of the hand and assembled them using metal rods and rubber bands. The curling motion of the fingers is achieved by winding a fishing line that is attached to the top of each finger. When the servo turns, it winds the string, causing the fingers to curl.
- To control the servos, the robotic hand uses a Raspberry Pi Zero connected to a PCA9685 16-channel Servo Hub. I wanted the hand to mirror my own movements, so I employed the Mediapipe library to track my fingers. To create an algorithm that retrieves angle data from my finger movements, I first had to calibrate the system. Since everyone has different hand dimensions, the program starts by calibrating the user's hand in both an open and closed position. The algorithm then detects how much each finger is curled and how spread apart they are from one another.
- Because the Raspberry Pi Zero is not powerful enough to handle video processing, I performed that task on my laptop and transmitted the servo angle data to the Raspberry Pi Zero via WiFi. This setup allows me to move my fingers, and the robotic hand mirrors those movements.
- Looking ahead, I aim to add a thumb to the hand and replace the servos with linear actuators. The limitation of servos is that they don’t provide much torque, which restricts the hand's ability to hold objects effectively. I also plan to run the video processing locally using an NVIDIA Jetson Nano.
- I have been working on designing a retainer or cap that can help during chemotherapy care. This cap is specifically designed to cover a port, where a needle penetrates the skin to access the superior vena cava, which is a common procedure during chemotherapy. My personal experience has inspired me to invent this cap after observing the challenges that patients face during their treatment.
- It is a common practice for patients to apply numbing cream over the port before the procedure to alleviate the pain. However, the cream is most effective when it remains in place for an extended period, often needing to stay in place for over an hour. However, everyday activities such as wearing a seatbelt can lead to unintended smudging of the numbing cream, resulting in severe pain for the patient.
- To address this issue, I have conceived a protective cap that safeguards the numbing cream on top of the port, preventing unintended rubbing during daily activities. I have taken proactive steps and successfully filed a provisional patent (AppNo: 63392764) for my invention and plan to license the innovation. Additionally, I have created my concept into a 3D model, allowing for the prototype of my design to get tested.
- The initial prototype, tested on a patient throughout treatment, received positive feedback, significantly reducing pain during needle insertion into the port. Oncology nurses expressed that the port cap was an excellent idea and wished more patients could use it. I have been working with the Beaumont Hospital Cancer Treatment Center to improve the device. This invention could positively benefit the field of chemotherapy care, as the challenge of numbing cream rubbing off is a widespread and painful issue.
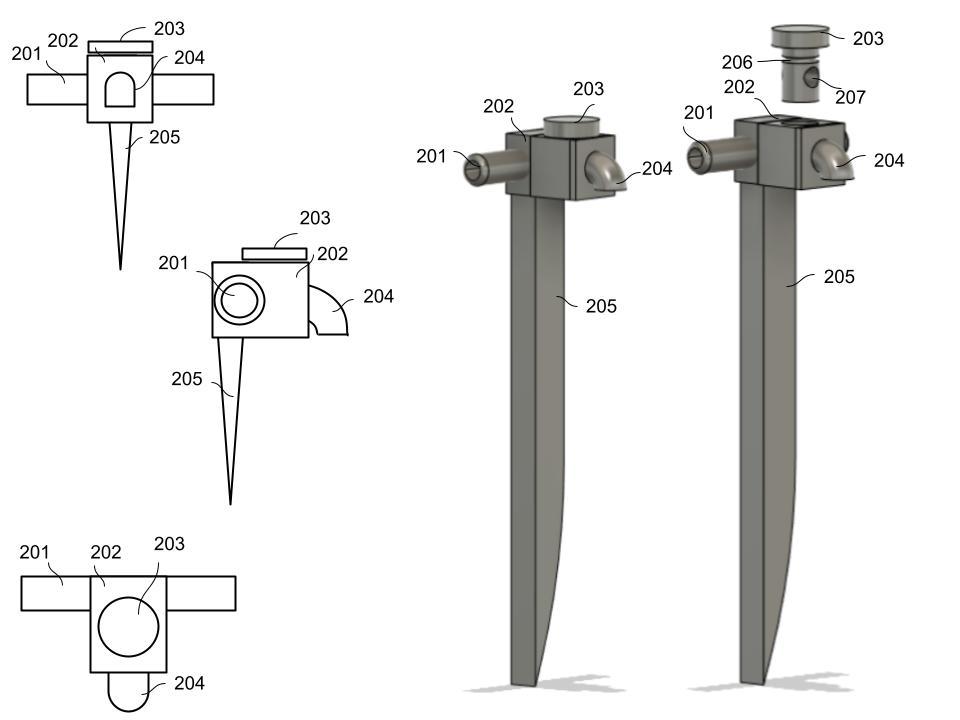
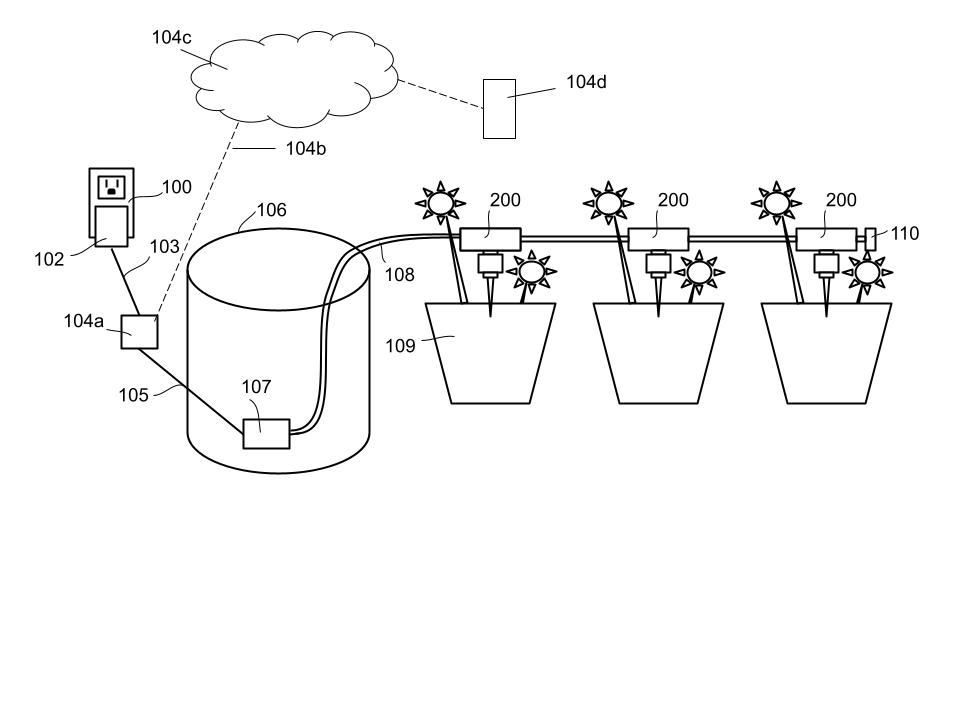
- I developed and patented a plant watering system to address the need for plant care during family vacations.
- The model was designed using CAD (Computer-Aided Design), and I manufactured it using my 3D printer. Although it did not work the first time, after several iterations, the product became functional.
- This system consists of a water pump, pipes, and 3D-printed valves, which can be easily customized to meet the needs of different plants. By integrating a WiFi connection, the system can be controlled through an app, providing optimal care for plants from anywhere outside the house.
- In pursuit of winter convenience, I constructed a remote-controlled snow blower to simplify the demanding task of snow removal. The snowblower allows users to clean their driveways through remote control, all in the comfort of their warm, cozy household.
- I carefully selected drive motors that met specific torque and speed requirements, addressing challenges posed by winter weather.
- However, I faced issues with traction, so I have laid the groundwork for future improvements, considering options like adding spikes on wheels or exploring custom-designed wheels optimized for snowy conditions.